Resolving Class Imbalance Problem for LiDAR-based Object Detector by Balanced Gradients and Contextual Ground Truth Sampling
Abstract
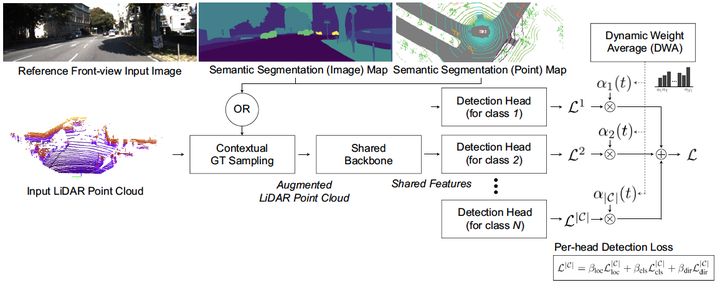
An autonomous driving system requires a 3D object detector, which must perceive all present road agents reliably to navigate an environment safely. However, real world driving datasets often suffer from the problem of data imbalance, which causes difficulties in training a model that works well across all classes, resulting in an undesired imbalanced sub-optimal performance. In this work, we propose a method to address this data imbalance problem. Our method consists of two main components (i) a LiDAR-based 3D object detector with per-class multiple detection heads where losses from each head are modified by dynamic weight average to be balanced. (ii) Contextual ground truth (GT) sampling, where we improve conventional GT sampling techniques by leveraging semantic information to augment point cloud with sampled ground truth GT objects. Our experiment with KITTI and nuScenes datasets confirms our proposed method’s effectiveness in dealing with the data imbalance problem, producing better detection accuracy compared to existing approaches.