Finetuning Pre-trained Model with Limited Data for LiDAR-based 3D Object Detection by Bridging Domain Gaps
Abstract
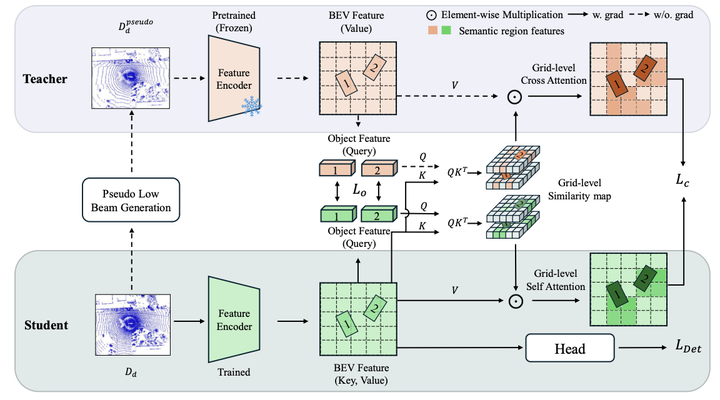
LiDAR-based 3D object detectors have been largely utilized in various applications, including autonomous vehicles or mobile robots. However, LiDAR-based detectors often fail to adapt well to target domains with different sensor configurations (e.g., types of sensors, spatial resolution, or FOVs) and location shifts. Collecting and annotating datasets in a new setup is commonly required to reduce such gaps, but it is often expensive and time-consuming. Recent studies suggest that pre-trained backbones can be learned in a self-supervised manner with large-scale unlabeled LiDAR frames. However, despite their expressive representations, they remain challenging to generalize well without substantial amounts of data from the target domain. Thus, we propose a novel method, called Domain Adaptive Distill-Tuning (DADT), to adapt a pre-trained model with limited target data ($\approx$100 LiDAR frames), retaining its representation power and preventing it from overfitting. Specifically, we use regularizers to align object-level and context-level representations between the pre-trained and finetuned models in a teacher-student architecture. Our experiments with driving benchmarks, i.e., Waymo Open dataset and KITTI, confirm that our method effectively finetunes a pre-trained model, achieving significant gains in accuracy.