Who Should Have Been Focused: Transferring Attention-based Knowledge from Future Observations for Trajectory Prediction
Abstract
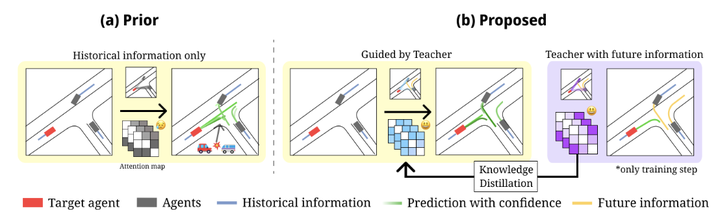
Accurately predicting the trajectories of dynamic agents is crucial for the safe navigation of autonomous robotics. However, achieving precise predictions based solely on past and current observations is challenging due to the inherent uncertainty in each agent’s intentions, greatly influencing their future trajectory. Furthermore, the lack of precise information about agents' future poses leads to ambiguity regarding which agents should be focused on for predicting the target agent’s future. To solve this problem, we propose a teacher-student learning approach. Here, the teacher model utilizes actual future poses of other agents to determine which agents should be focused on for the final prediction. This attentional knowledge guides the student model in determining which agents to focus on and how much attention to allocate when predicting future trajectories. Additionally, we introduce a Lane-guided Attention Module (LAM) that considers interactions with local lanes near predicted trajectories to enhance prediction performance. This module is integrated into the student model to refine agent features, thereby facilitating a more accurate emulation of the teacher model. We demonstrate the effectiveness of our proposed model with a large-scale Argoverse motion forecasting dataset, improving overall prediction performance. Our model can be used plug-and-play, showing consistent performance gain. Additionally, it generates more human-intuitive trajectories, e.g., avoiding collisions with other agents, keeping its lane, or considering relations with other agents.